Влияние высоты подножки на технику гребли
Новый датчик усилий на подножке был разработан в BioRow, который состоит из четырех измерительных элементов (носки-пятки, справа-слева), чувствительных лишь к горизонтальной составляющей силы (Рис.1). Со специальными креплениями, датчик можно использовать в любой лодке или на гребном тренажере. Также, доступна 2D версия для изменения как горизонтального, так и вертикального компонентов сил на подножке.
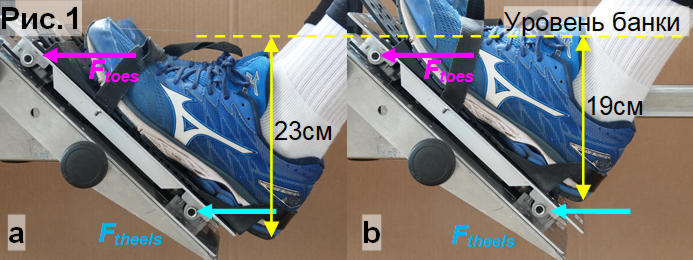
Датчик был использован на гребном тренажере RP3 в небольшом эксперименте с двумя различными положениями подножки: самым низким (а) на 23 см ниже уровня банки, и наивысшим возможным на 4 см выше. При каждом положении подножки, два гребца международного уровня повторили тест состоящий из восьми отрезков по 15-20 гребков со ступенчатым возрастанием темпа от 20 до 48 гвм и произвольными паузами между отрезками. В дополнение к усилиям на подножке, измерялись усилие на рукоятке, положения рукоятки, банки и туловища, и ускорение подножки-каретки тренажера. Для проверки точности измерения усилий, ускорение ad было рассчитано по измеренным усилиям на рукоятке Fh и подножке Fs и известной массе каретки m =27кг:
ad = (Fh - Fs) / m (1)
Было определено (Рис.2,с), что измеренное ускорение достаточно точно соответствует рассчитанному в пиковых точках, и это свидетельство точности измерения усилий. Некоторые отклонения могли быть вызваны силами трения при движениях каретки.
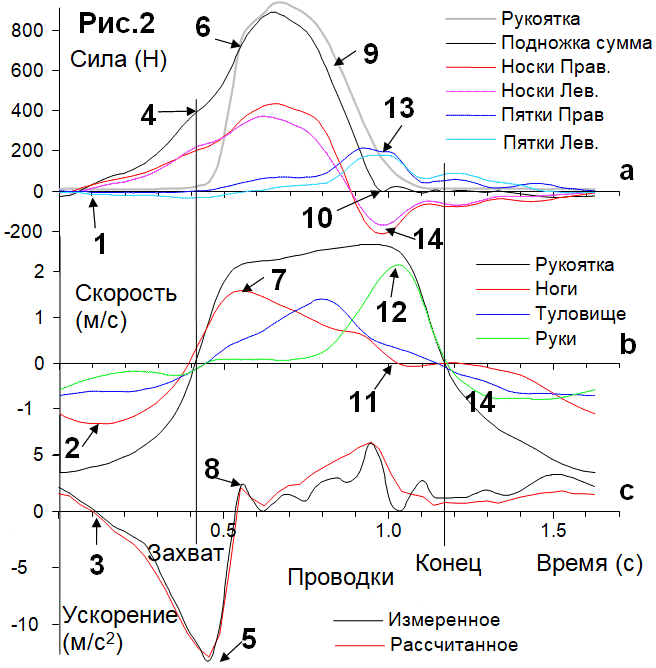
Рис.2 показывает данные при низком положении подножки при темпе 36,9 гвм. Сила на подножке начинает нарастать примерно за 0,35 с перед захватом (1), и в то же время скорость банки достигает отрицательного пика на подготовке (2) и ускорение меняет знак (3).
В захвате, усилия на подножке составляют почти половину пиковых значений (4) при нулевых усилиях на рукоятке, что создает резкий отрицательный пик ускорения (5). Затем, усилие на рукоятке резко возрастает и становится выше усилия на подножке (6), что совпадает с пиком скорости банки (7) и первым положительным пиком ускорения (8).
Усилия на подножке остаются ниже таковых на рукоятке до конца проводки (9) и становятся нулевыми примерно 0,2с перед концом проводки (10), когда ноги заканчивают движение (11) и руки достигают пиковой скорости тяги (12). В этот момент, пятки продолжают упираться в подножку (13), но носки уже тянут за ремни в обратном направлении (14), и эти силы сбалансированы.
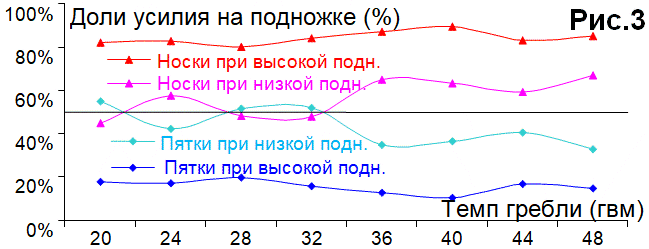
При низкой подножке, доли сил через носки и пятки примерно равны при низких темпах (Рис.3), а при темпе выше 32 гвм, около 60% силы передается через носки и лишь 40% -через пятки. При высокой подножке, 80-90% усилий приходится на носки, и лишь 10-20% на пятки.

Табл.1 показывает средние данные двух гребцов на всех отрезках. Основные индикаторы гребли оказались лучше при низком положении подножки: длина гребка и работа ног была длиннее на 1.7% и 3.0%, средние усилия на рукоятке и работа за гребок были на 0.6% и 2.4% выше.
Фактор Захвата был ближе к модели при низкой подножке (банка меняла направление раньше), а Фактор Стиля Гребли был практически одинаков. Наоборот, Фактор Конца Гребка был несколько лучше при высокой подножке – он всегда находился в модельной зоне. При низкой подножке и на низких темпах, этот индикатор был положительным – плечи продолжали движение проводки, когда рукоятка уже изменила направление.
Результаты исследования свидетельствуют, что низкое положение подножки может быть предпочтительнее для мощности и техники гребли. Полученные данные подтвердили применимость нового датчика BioRow и точность измеренных усилий на подножке.
©2020 Валерий Клешнев
