Сила на подножке и движение банки
Иногда, клиенты BioRow спрашивают нас: «Измеряете ли вы усилие на подножке?» Конечно, мы можем это сделать различными методами (НБГ 2013/08, 2017/05), но установка датчиков усилия на подножке – это очень трудоемкая и нестандартная задача, поскольку лодки различных производителей имеют большое разнообразие конструкций подножек. Поэтому, мы не измеряем усилие на подножке напрямую в стандартной процедуре тестирования BioRow (где время установки крайне ограничено, от 20 мин для 1х до 70 для 8+), но мы можем оценить их по движению банки. Здесь, мы проанализируем связь усилий на подножке с движениями банки.
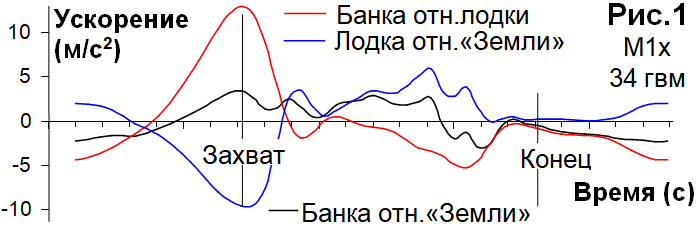
Данные были получены в одиночке, оборудованной стандартной системой BioRow (НБГ 2009/10, 2017/12), дополненной датчиками на подножке, которые измеряли горизонтальную составляющую усилия в трех точках (НБГ 2013/08, 2019/01). Одиночник (1.84см, 85кг) выполнил стандартный протокол тестирования BioRow со ступенчато возрастающим темпом от 18 до 41 гвм. Положение банки измерялось с помощью струнного датчика BioRow (2014/12) и было использовано для расчёта ускорения банки относительно лодки, которое суммировалось с ускорением лодки и давало ускорение банки в глобальной системе координат (относительно «Земли», Рис.1).
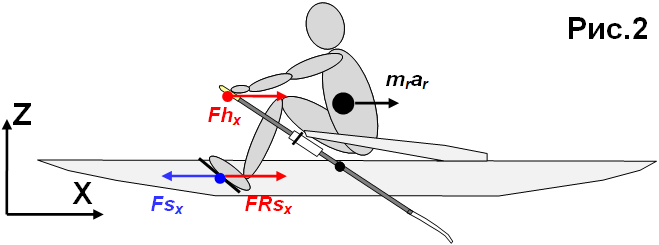
Баланс X компонентов усилия на подножке Fsx и рукоятке Fhx (Рис.2) можно выразить как:
Fhx + mrar - Fsx = 0 (1)
где mrar – инерционная сила действующая на ЦМ гребца, которая равна произведению его массы mr и ускорения ar. Поэтому, сила на подножке равна:
Fsx = Fhx + mrar
В этом исследовании, мы полагаем, что движение ЦМ гребца представлено движением банки. Конечно, это не совсем точно, поскольку движения верхних частей тела гребца могут значительно отличаться от движений банки, что влияет как на величину движущейся массы mr, так и на ее ускорение ar. Также, несколько других факторов влияют на баланс сил рукоятка-подножка, но не включены в уравнения выше: 1) осевое усилие на рукоятке, которое статически переносится на подножку (НБГ 2019/02), 2) небольшая сила трения на полозках, 3) аэродинамическая сила сопротивления, действующая на тело гребца. Все эти допущения являются ограничениями точности исследования.
Усилия на подножке Fsx(d) полученные по уравнению 2 в цикле гребка были сопоставлены с непосредственно измеренными Fsx(m) (Рис.3). Обнаружено, что обе силы очень похожи на подготовке, но значительно различаются во время проводки, что есть следствие ограничений.
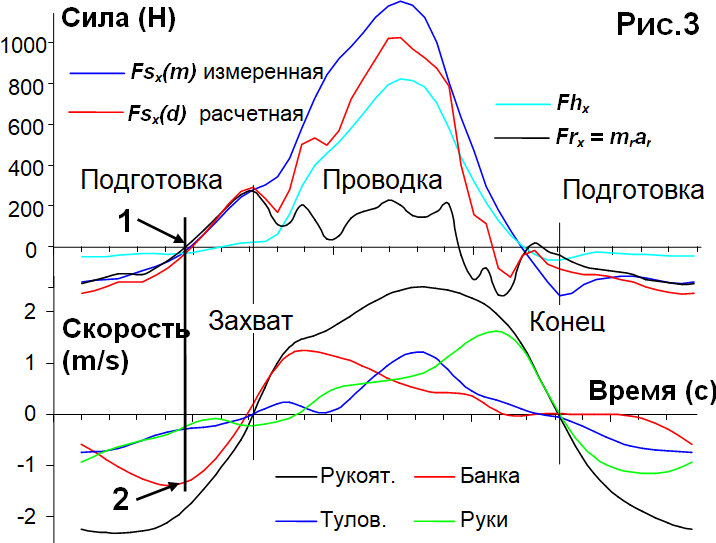
Важно, что обе кривые пересекают нулевую линию одновременно перед захватом (1): в этот момент, гребец переключается с тяги за подножку (отрицательная сила) на давление в нее (положительные усилия на подножке), и этот момент совпадает с отрицательным максимумом скорости банки по подготовке (2). Поэтому, это подтверждает тот факт, что движение банки можно использовать, как адекватный индикатор усилий на подножке в фазе подготовки.
В отчетах, время отрицательного пика скорости банки (2) используется, как стартовая точка оценки синхронизации гребцов в команде (Т1, НБГ 2014/05, 2015/03). Поэтому, движение банки определяет очень важную синхронизацию взаимодействия гребцов через подножку перед захватом и в захвате.
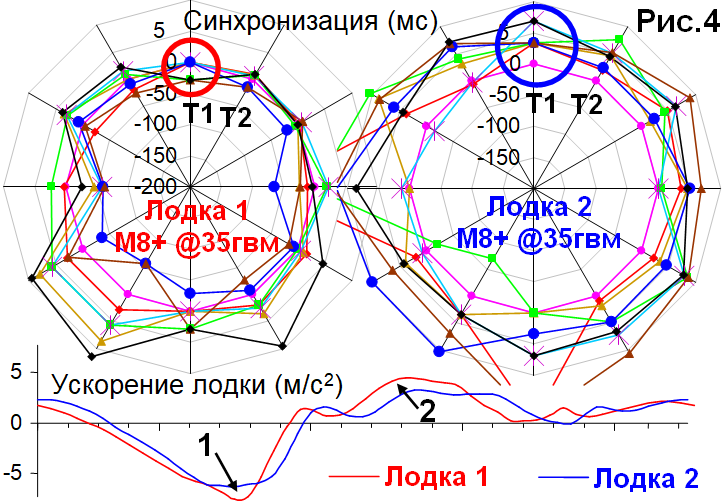
Рис.4 иллюстрирует вышеизложенное: лучшая синхронизация движений банки в команде 1 перед захватом (Т1) и в захвате (Т2) связана с оптимальной кривой ускорения лодки (1) и ее более эффективной динамикой на проводке (2).
©2019 Валерий Клешнев
