Передача усилий через рукоятку
Новые данные, полученные с помощью недавно разработанного датчика 4D рукоятки BioRow (НБГ 2021/06), позволяют определить полную картину передачи усилий от гребца на весло. Угол тяги в горизонтальной плоскости XY Axy можно определить по отношению нормальной Fn и осевой Fa сил:
Axy = atan(Fn/Fa) (1)
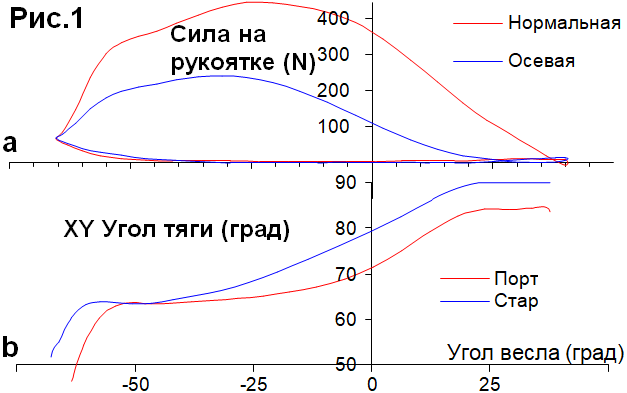
Угол тяги оказался порядка 60-65град в первой трети проводки (Рис.1), затем он возрастает до 80-90град перед концом. Углы тяги были верифицированы по геометрии гребец-весло определенной по видео сверху (Рис.2). Было обнаружено хорошее соответствие между углами рука-весло и углами тяги по анализу усилий.

Это означает, что тяга напрямую через предплечье – основной способ передачи усилий и вращающий момент от сведения рук не играет значительной роли (у этого гребца).
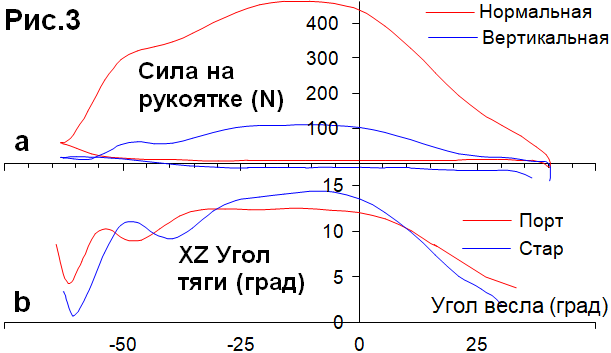
Угол тяги в сагиттальной XZ плоскости можно получить аналогично через отношение вертикальной и горизонтальной сил (Рис.3):
Axz = atan(Fv/Fn) (2)
Верификация с видео анализом (Рис.4) также показала хорошее соответствие: угол тяги составляет 12-15град кверху в первой половине проводки, затем он становится более горизонтальным - снижается до 4-6град.

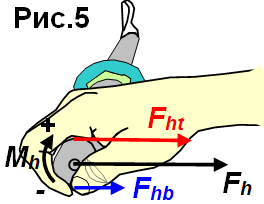 Четвертой переменной, измеряемой с помощью новой 4D рукоятки BioRow , является вращающий момент Mh, который создается ассиметричной тягой (Рис.5). Если бы гребец тянул рукоятку точно по центральной оси, то этот момент был бы нулевым, но обычно, больше усилий прикладывается к верху рукоятки, поэтому положительный момент был установлен к раскрытию весла.
Четвертой переменной, измеряемой с помощью новой 4D рукоятки BioRow , является вращающий момент Mh, который создается ассиметричной тягой (Рис.5). Если бы гребец тянул рукоятку точно по центральной оси, то этот момент был бы нулевым, но обычно, больше усилий прикладывается к верху рукоятки, поэтому положительный момент был установлен к раскрытию весла.
Момент на рукоятке был определен в 5-6 Нм на первой половине проводки (Рис.6), затем он снижается до 1-2 Нм "после перпендикуляра" и возрастает снова до 2-3 Нм перед концом для раскрытия весла.
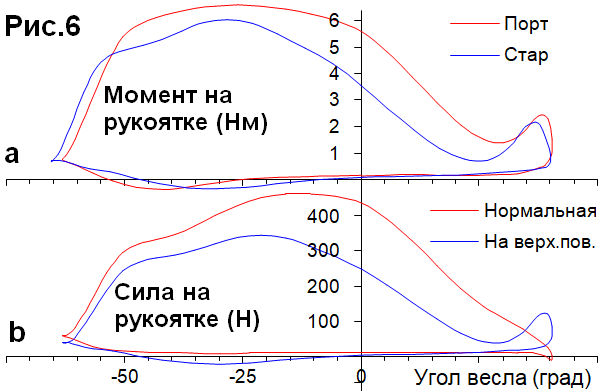
Момент можно конвертировать в силу приложенную к поверхности рукоятки через ее радиус (здесь 17.5 мм):
F(M) = Mh / Rh (3)
Сравнение нормальных усилий на рукоятке с силой созданной вращающим моментом (Рис.6,b) показывает, что усилия прикладываются к рукоятке ассиметрично, в основном, к ее верхней поверхности. На проводке, момент на рукоятке балансируется противоположным моментом реакции на уключине (и возможно, на лопасти), но перед концом момент рукоятки доминирует и весло раскрывается.
Новые данные, полученные с помощью 4D рукоятки BioRow, помогают лучшему пониманию Биомеханики Гребли, а также точному анализу индивидуальной техники гребли и настройки лодки-весла (напр. влияние выноса, накрытия и т.п.).
©2021 Валерий Клешнев
