Точный баланс пропульсивных сил
Определение баланса пропульсивных сил в системе гребец-лодка-весло крайне важно для понимания точной механики передачи сил и мощности от гидродинамических сил на лопасти – в движение системы. Ясное понимание этой механики поможет оптимизировать КПД системы и улучшить результаты. Ранее, было невозможно определить этот баланс достаточно точно, и были обнаружены расхождения между пропульсивной силой на лопасти (определенной прежними методами) и силой действующей на систему гребец-лодка (НБГ 2019/02, 2020/12). С помощью наших последних разработок в BioRow: метода точного определения центра давления ЦД на лопасти (НБГ 2020/10) и 4D датчика в рукоятке весла (НБГ 2021/06) измеряющего осевую силу, стало возможным сложить всю мозаику и определить точный баланс продвигающих сил в гребле.
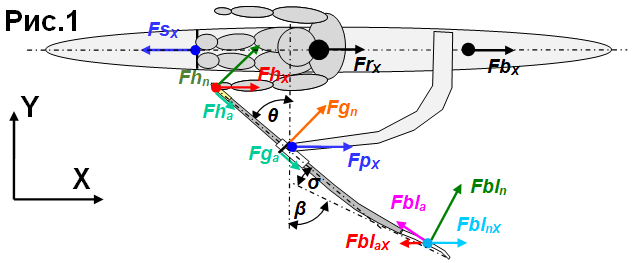
Измерения были проведены в той же самой оборудованной одиночке, что и ранее (НБГ 2019/01-02), поэтому, мы не будем повторять их описание. Продвигающая сила на лодке FbX (Рис.1), также, была определена прежним способом, как разница между силами на оси FpX и подножке FsX:
FbX = FpX – FsX (1)
Продвигающая сила действующая на центр массы ЦМ гребца FrX была определена, как разность между силой реакции на подножке FsX и результирующей Х силой на рукоятке FhX, а последняя является суммой Х компонентов нормальной Fhn и осевой Fha сил на рукоятке. Ранее (НБГ 2019/02), предполагалось, что Fha равна измеренной осевой силе на уключине Fga, и «они могут лишь немного отличаться», что оказалось неверно. Теперь, осевая сила на рукоятке Fha измерялась напрямую с помощью 4D датчика BioRow в рукоятке НБГ 2021/06) и использовалась в уравнении для продвигающей силы на ЦМ гребца FrX:
FrX = FsX – FhX = FsX – (Fhn cos(θ) + Fha sin(θ)) (2)
Продвигающая сила всей системы FsysX была определена, как векторная сумма сил на лодке и ЦМ гребца:
FsysX = FrX + FbX (3)
Нормальная сила на лопасти Fbln была определена в НБГ 2020/10 через измеренный изгибающий момент на весле и действующий внешний рычаг, рассчитанный по точке ЦД на лопасти. Осевая сила на лопасти Fbla была определена в НБГ 2021/06, как векторная сумма осевых сил на рукоятке Fha и уключине Fga, с коррекцией на изгиб весла на угол σ:
Fbla = (Fha – Fga - Fbln*sin(σ)) / cos(σ) (4)
Общая продвигающая сила на лопасти FblX была определена, как векторная сумма X компонентов нормальной FblnX и осевой FblaX сил:
FblX = FblnX + FblaX = Fbln cos(β) + Fbla sin(β) (5)
где угол лопасти β рассчитывался, как сумма измеренного угла весла θ и угла изгиба σ определяемого через фактор жесткости весла и нормальную силу Fbln:
β = θ + σ (6)
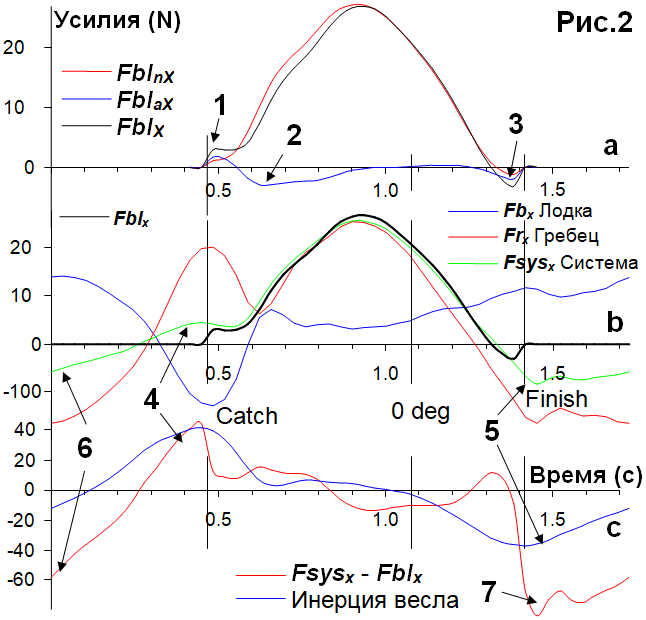
В самом начале проводки (Рис.2,а, данные М1х при 34гвм), осевая сила вносит основной вклад в работу лопасти (1), но затем играет негативную роль и создает тормозящую силу в первой половине проводки (2) и перед концом (3). Поэтому, важно уменьшать сопротивление вызванное осевой силой на лопасти и сделать ее поверхность такой же гладкой, как и поверхность лодки.
Кривые продвигающих сил на лопасти FblX и системе гребец-лодка FsysX оказались очень близки (Рис.2,b) и соответствуют намного ближе, чем в предыдущих экспериментах, так что их средние значения за проводку отличаются лишь 0.5%. Основной причиной различий между ними были силы инерции на весле (Рис.2,с), которые увеличивают продвижение системы в захвате (4, вращение весла замедляется и инерция толкает оси вперед), но снижает ее после конца проводки (5, весла ускоряются и давят оси назад). Причина дополнительной тормозящей силы в середине подготовки (6) может быть аэродинамическое сопротивления весел. После конца проводки (7) – касание воды развернутой лопастью (средняя FsysX - FblX за цикл гребка была -15N).
Основным достижением данного исследования является получение точного баланса пропульсивных сил в системе гребец-лодка-весло, который подтверждает правильность наших моделей, точность измерений и позволяет проводить дальнейшие исследования и оптимизацию биомеханики гребли.

Благодарю за помощь c этим исследованием мою жену Катерину, тренера Marlow RC, трагически ушедшую от нас 8 сентября.
©2021 Валерий Клешнев
