Передовые исследования механики весла
Новый исследовательский проект о механике работы весла и всей гребной системы начался в Октябре. Недостатком предыдущих работ было отсутствие данных о точках приложения сил на рукоятке и лопасти весла, что не позволяло точно определить реальную величину усилий, действующие внутренний и внешний рычаги, передаточное отношение и т.п. Был разработан новый метод измерений, который заполняет вышеназванный пробел в наших знаниях и позволяет определить реальные силы действующие на гребную систему, а следовательно и механику передачи мощности и пропульсивный КПД.
Пара парных весел (Concept2 skinnies с лопастями Smoothies, 88/288 см) была оборудована четырьмя тензо-датчиками на каждом весле (полные мосты с усилителями), наклеенными прямо на ось весла в определенных местах: два датчика – на внутреннем рычаге, и два – на внешнем (Рис.1, S1 – S4).

Датчики были откалиброваны для измерения изгибающих моментов в их точках, для чего прикладывались динамические усилия, которые умножались на соответствующие рычаги: расстояния от датчика до точки приложения силы на рукоятке или лопасти. Калибровка повторялась в 4-5 точках для каждого датчика и коэффициенты были очень стабильными.
Когда усилия прикладываются к рукоятке или лопасти во время гребли, весло изгибается и каждый датчик измеряет момент M в своей точке, который зависит как от силы F, так и от ее рычага L относительно датчика:
M = F L (1)
Каждый датчик в паре на внутреннем или внешнем рычаге измеряет свой момент M1 и M2, который зависит от соответствующих рычагов L1 и L2, но сила F – одна и та же, поэтому ее можно определить:
F = M1 / L1 = M2 / L2 (2)
Поскольку точки датчиков постоянны и расстояние S между ними известно, это определяет разницу между рычагами:
S = L1 – L2 , или L1 = L2 + S (3)
Преобразуем уравнение 2 и подставляем L1:
M1/M2 = L1/L2 = (L2+S)/L2 = 1+(S/L2) (4)
В итоге:
L2 = S M2 / (M1 – M2) (5)
Или, подставляя L2:
L1 = S M1 / (M1 – M2) (6)
Таким образом, возможно определить действующие рычаги сил, а следовательно и точки приложения усилий на рукоятке и лопасти весла, посредством сравнения пары изгибающих моментов на весла в известных точках расположения датчиков. Зная рычаги сил и измеренные изгибающие моменты, можно определить действующие силы на рукоятке и лопасти весла с помощью уравнения 2 выше.
Новый метод был успешно верифицирован подвешиванием вела в различных точках на рукоятке и лопасти весла, и сравнением реального положения точки приложения усилий с рассчитанной на основе измеренных моментов. Видео верификации можно увидеть здесь.
Приводим краткие результаты первых измерений с использованием нового метода в М1х при 30 гвм. Лодка была также оборудована многими другими датчиками (уключины, подножка, и др., см. НБГ 2019/01) для верификации новых данных.
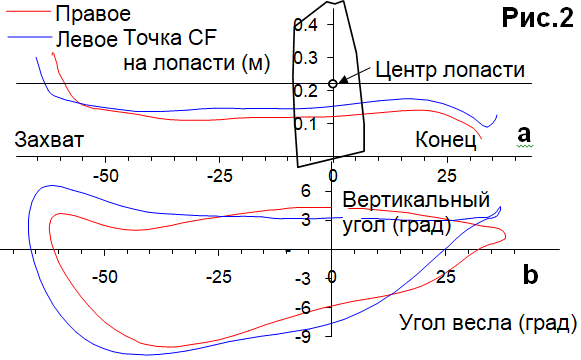
Было обнаружено, что точки центра приложения усилий (CF) на лопасти несколько смещены от ее геометрического центра к наружному краю (Рис.2,а). Действующий внешний рычаг был несколько короче на левом весле, что совпадало с его более глубоким погружением. В захвате, действующий внешний рычаг был короче, в конце – несколько длиннее.
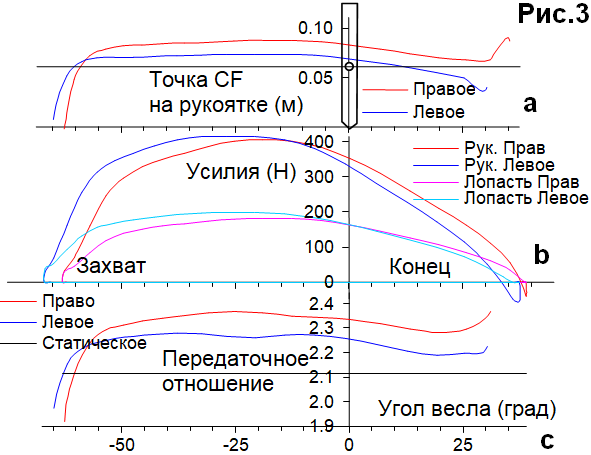
Точки усилий на рукоятке были также несколько смещены от ее центра, и правое весло имело более короткий действующий внутренний рычаг, в противоположность действующему внешнему (Рис.3,а). Это привело к более тяжелому передаточному отношению на правом весле, и оба весла имели его значения выше, чем рассчитанные через геометрические центры рукоятки и лопасти.
Продолжение результатов исследования Вы увидите в следующих статьях.
Благодарим компанию Concept2 Inc. и лично ее основателя Дика Дрессигакера за проявленный интерес и поддержку этого исследования.
©2020 Валерий Клешнев
