Баланс продвигающих сил
Мы продолжаем анализ сил в гребле и теперь рассмотрим баланс продвигающих сил. Сила Fbx действующая на лодку была определена (НБГ 2019/01), как разность между силами на оси Fpx и подножке Fsx:
Fbx = Fpx – Fsx (1)
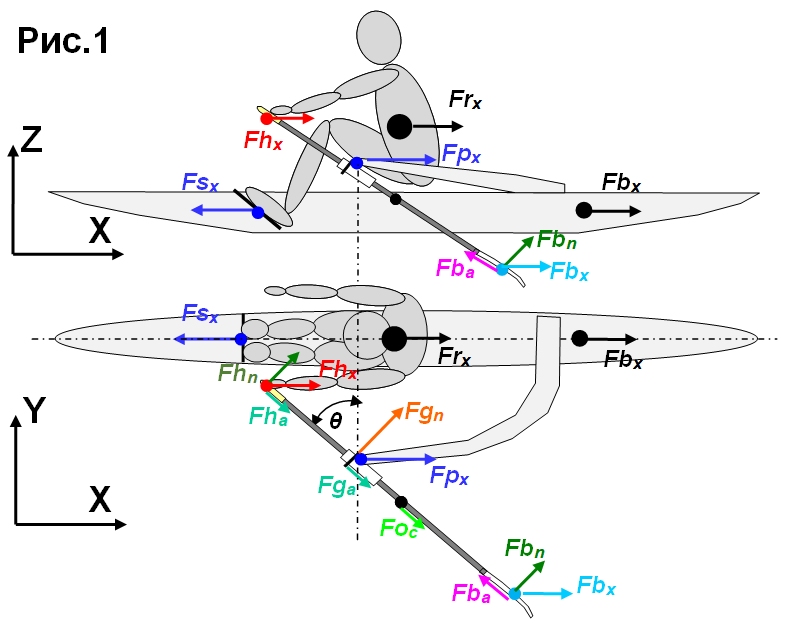
Продвигающая сила, приложенная к центру массы (ЦМ) гребца Frx была определена, как сумма сил реакции на подножке Fsx и рукоятке Fhx (Рис.1), где последняя – есть сумма X компонентов нормальной Fhn и осевой Fha сил на рукоятке. Последняя была принята равной измеренной осевой силе на уключине Fga, но на самом деле, они несколько различны, поскольку осевая сила на лопасти Fba и центробежная сила вращения весла Foc влияют лишь на силу на уключине Fga.
Frx = Fsx - Fhx = Fsx – (Fhn cos(θ) + Fga sin(θ)) (2)
где θ угол весла. Рис.2 показывает эти силы в M1x при 35.5 гвм, те же данные, что и в НБГ 2019/01.
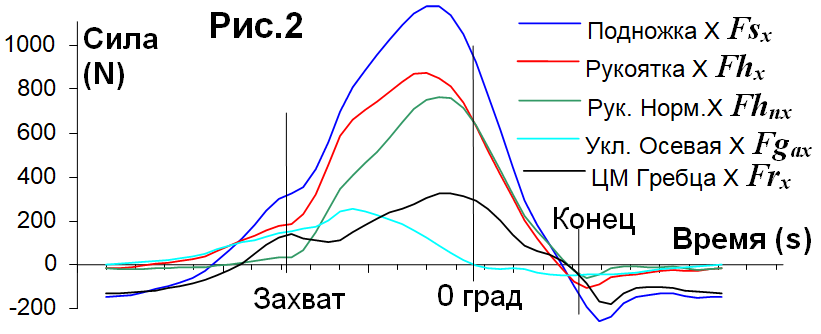
Продвигающая сила действующая на всю систему лодка-гребец Fpsysx была определена, как сумма сил приложенных к лодке Fbx и ЦМ гребца Frx (Ур.1,2), Сила на подножке Fsx сокращается, и Fpsysx есть разность между X силами на оси Fpx и рукоятке Fhx:
Fpsysx = Frx + Fbx = (Fpx – Fsx)+ (Fsx - Fhx) = Fpx - Fhx (3)
Поэтому, сила на подножке никак не учитывается в продвигающей силе системы, а является внутренней силой между лодкой и массой гребца. Продвигающая сила действующая на вся систему лодка-гребец – есть разница между Х-компонентами сил на оси и рукоятке. Однако, это не означает то, что гребец должен минимизировать силу на подножке, поскольку она жестко передается через лодку-отвод на силу на уключине-оси, чья противоположная сила реакции является главным позитивным компонентом продвигающей силы системы.
В середине подготовки, Fpsysx близка к нулю, как и ожидалось (Рис.3,1), но продвигающая сила системы становится положительной уже перед захватом (2), что может быть результатом центробежной силы Foc и силы инерции вращения весла Fo.in (НБГ 2015/05). На подготовке, ЦМ весла (расположенный на внешнем рычаге) двигается вперед, и его кинетическая энергия передается в систему при торможении весла перед захватом (2). После конца проводки, сила инерции весла негативна, что снижает продвигающую силу системы (3).
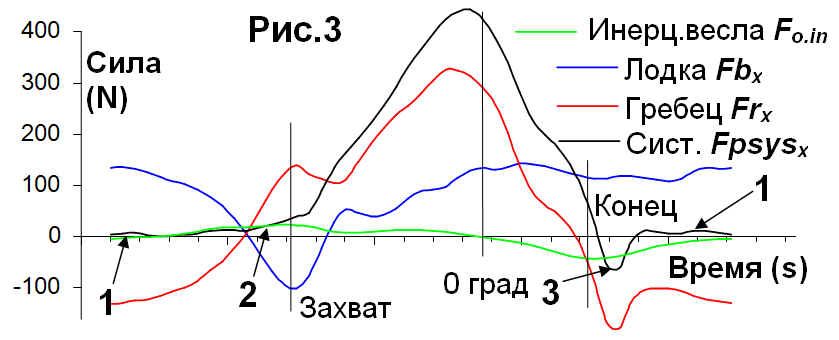
X компоненты силы инерции весла были определены через его угловое ускорение α полученное через измеренный угол, момент инерции весла Io на оси (1.6 kgm2) и расстояние между ЦМ весла и осью вращения LoCM (0.42м от оси):
Fo.in = Io α / LoCM cos(θ) (5)
Сила инерции весла хорошо объясняет рост продвигающей силы перед захватом (Рис.3,2) и ее западение после конца проводки (3).
Общая продвигающая сила, измеренная на рукоятке и оси Fpsysx была сопоставлена с таковой, традиционно используемой, как продвигающая сила на лопасти Fbx определяемая через силу на рукоятке Fh, передатовное отношение весла (внутренний рычаг Lin – к внешнему Lout) и угол весла θ:
Fbx = Fh (Lin/Lout) cos(θ) (6)
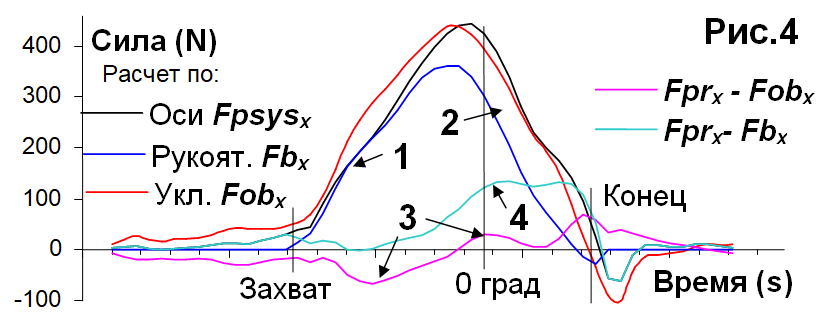
Эти две силы были близки на первой половине проводки (Рис.4,1), но затем Fpsysx становится намного выше, чем Fbx (2). Чтобы исключить ошибку датчиков, продвигающая сила на лопасти Fobx была выведена через датчики весла, которые независимы от датчика на оси:
Fobx = (Fgn – Fhn) cos(θ) (7)
где Fgn – нормальная сила на уключине, Fhn – сила на рукоятке. Две силы Fpsysx и Fobx почти совпадают, а небольшую разницу между ними (3) можно отнести к осевой силе на лопасти Fbax и центробежной силе Foc, которые не измерялись датчиками на весле Fobx, но влияли на общую продвигающую силу Fpsysx.
Значительные различия Fpsysx-Fobx во второй половине проводки (4) можно объяснить лишь сдвигом центра давления на лопасти ближе к оси, что укорачивает реальный внешний рычаг и увеличивает силу на лопасти, так что Fbx определенная через силу на рукоятке и передаточное отношение оказывается недооцененной. Это было мое предположение при анализе отношения сил на рукоятке/уключине (НБГ 2014/02).
Чтобы проверить, что это увеличение силы на лопасти действительно существует, различные версии продвигающей силы были усреднены за цикл гребка при различном темпе (17.2-41.5 гвм) и скорости (2:16-1:31 с/500м) гребли. Сила сопротивления на корпусе лодки (НБГ 2019/01) также была усреднена, все эти четыре силы были положены на график относительно скорости лодки и степенные тренды построены по этим данным (Рис.5)
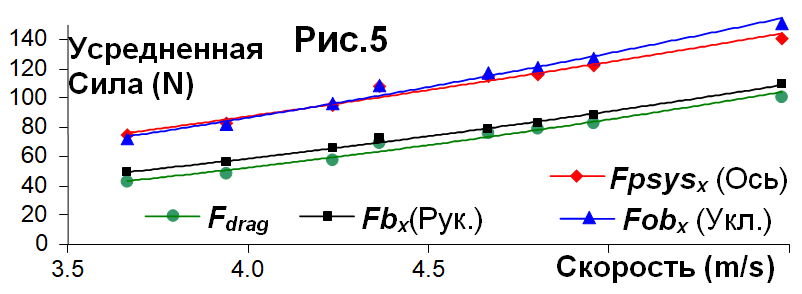
Наилучшее соответствие было обнаружено между силой сопротивления и Fbx – продвигающей силой, полученной традиционным способом лишь через силу на рукоятке (r=0.991). В среднем, продвигающая сила на лопасти оказалась на 8,3% больше силы сопротивления лодки, что можно легко объяснить дополнительной силой аэродинамического сопротивления. Две другие версии продвигающей силы также имели высокую корреляцию с силой сопротивления (r=0.998), но Fpsysx (полученная через силу на оси-рукоятке) была на 53.2% выше, и Fobx (от уключины-рукоятки) была на 57.1% выше, чем сила сопротивления. Это ставит под сомнение мою предыдущую гипотезу про увеличение силы на лопасти и укорочение внешнего рычага в конце гребка.
Возможное решение этой загадки с мистической дополнительной силой на оси-уключине может быть в отнесении ее к некоторой внутренней силе в системе лодка-гребец. Для этого, найденное ранее различие в продвигающих силах dFprop = Fpsysx- Fbx было сопоставлено с ускорениями лодки aboat и ЦМ гребца arower (Рис.6), где aboat измерялось напрямую, а arower было определено через измеренные движения банки и туловища гребца, добавленные к ускорению лодки. Скорости рукоятки и сегментов тела гребца даны для понимания фаз гребка.
Здесь я должен сослаться на мою модель превращения мощности в кинетическую энергию (НБГ 2018/11), пункт 9 которой можно дополнить следующим образом: «Два компонента системы, гребец и лодка, не только получают кинетическую энергию через весло, но также обмениваются ею между собой. … Обмен также происходит на проводке: в захвате, гребец ускоряет свой ЦМ работой ног, забирая кинетическую энергию от лодки, которая получает отрицательное ускорение.» В захвате, этот обмен происходит через подножку, что не учитывается в уравнении 3 продвигающей силы, и поэтому не отражается в различиях dFprop в ее версиях . Небольшая величина этих различий в захвате (Рис.6,1) может быть объяснена силой линейной инерции весла, которая давит на ось и выглядит, как продвигающая сила.
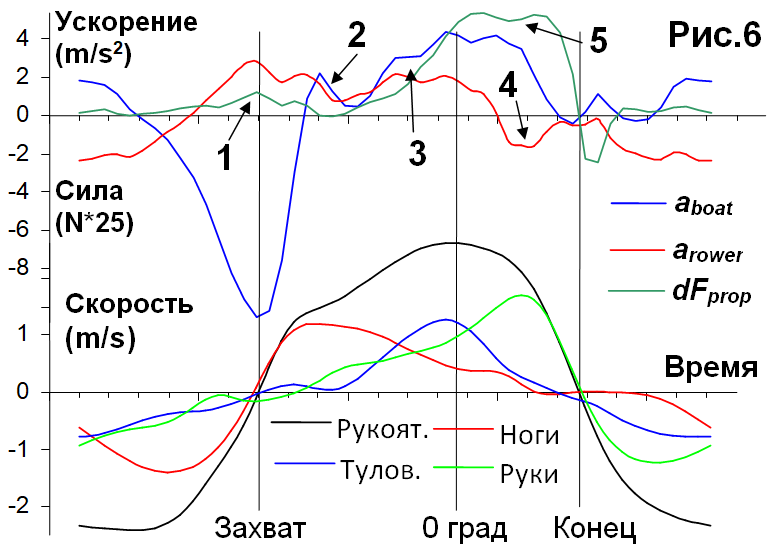
В начале проводки, ускорение лодки становится близко к
ускорению ЦМ гребца (2), поэтому, обмена кинетической энергией между ними не
происходит и dFprop близко к нулю.
В середине проводки, ускорение лодки становится выше, чем
ускорение гребца (3), затем последнее становится отрицательным (4). Это
означает, что гребец передает свою кинетическую энергию лодке, что происходит
через силы на уключине-оси, но не имеет отношения к продвигающей силе на
лопасти и отражается в наибольших различиях в силах dFprop (5).
Чтобы лучше понять эту механику, можно использовать
следующий пример (предложенный доктором Фолькером Нольте, правда, по другому
случаю). Представим, что гребец двигается вперед-назад в лодке с веслом жестко
закрепленным в уключине без возможности вращения и без работы лопасти в воде,
при этом, измеряется лишь сила на уключине. В «захвате», гребец давит в подножку,
но это не учитывается, поскольку это – внутренняя сила. В конце «гребка», гребцу
нужно замедлить свое движение, и он тянет за рукоятку, что измеряется в силе на
уключине и выглядит, как «продвигающая» сила.
Это пока лишь гипотеза и предстоит выполнить еще много
работы для лучшего понимания этой механики, для разработки методов анализа продвигающих
и внутренних сил в системе гребец-лодка-весло. Скажем, в предыдущем примере,
замедление гребца через зафиксированное весло должно создать и усилие на
рукоятке, которое вычитается из силы на уключине в ур.3, так что «продвигающая»
сила должна быть равна нулю. Возможно, здесь работают какие-то другие факторы: Передаточное
отношение весла? Трение банки? Осевые силы?
В заключение, механика
системы гребец-лодка-весло достаточно сложна, и главная проблема – разделение продвигающих
и внутренних сил, смешанных при измерениях на рукоятке, подножке и уключине-оси.
В настоящее время, нам не до конца ясно полное объяснение феномена увеличения силы
на лопасти во второй половине гребка. Будем рады услышать Ваши соображения и
гипотезы.
Благодарности: Благодарю компанию WinTech Racing Boats and Oarsport Ltd. за поддержку этого исследования.
©2019 Валерий Клешнев

Теги: Баланс продвигающих сил